School of
Computing and Electrical Engineering
Control System and Robotics Lab

The Control System & Robotics Lab. is accessible to students of all the departments. The lab. Is well equipped with controlling equipments i.e Balanduino, Multi Tank System, Robotics Arm, Lab view Starter kit etc. In this lab have some trainer kits i.e DC Motor Control Trainer kit , Heating Ventilation & Air conditioning Control Trainer, Mechatronic Sensors Control Trainer, Rotary Inverted Pendulam Control Trainer, VTOL Control Trainer lab.
Control System and Robotics Lab In-charge
 Dr. Tushar Jain
Dr. Tushar Jain Asst. Professor
Phone: 267117
EMail: tushar
Home Page
Control System and Robotics Lab Staff
 Shivam
Shivam Lab Technical Assistant
Phone: 267185
EMail: controllab
List of Equipments
|
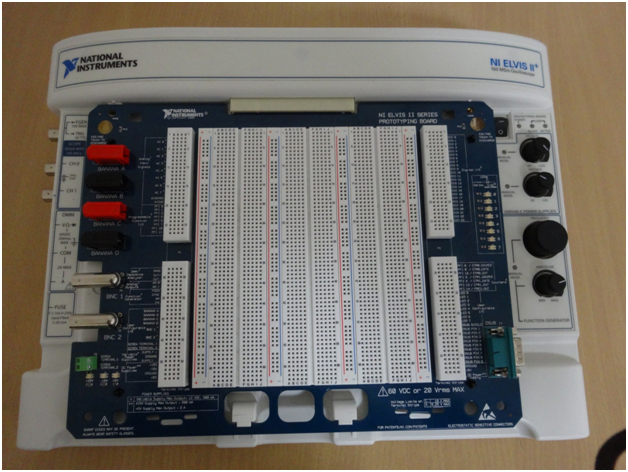
Introduction:- NI ELVIS II features one compact form factor integrated with 12 of the most commonly used instruments in the laboratory, including an oscilloscope, digital multimeter, function generator,variable power supply, and Bode analyzer. Applications:- You can connect the PC to these various measurements through USB plugandplay capabilities and build circuits on a detachable rotoboard. |

|
Introduction:- The DC Motor Control Trainer (DCMCT) is a versatile unit designed to teach and demonstrate the fundamentals of motor servo control in a variety of ways. The system can readily be configured to control motor position and speed. In particular, the system can be used to teach PID control fundamentals. Applications:- Printers, Cameras, Robots, Blu-ray players ,Vehicles etc. |

|
Introduction:- The Rotary Inverted Pendulum Trainer offers students the opportunity to balance a vertical rod at the tip of a rotating arm using a DC motor. This is a classic pendulum control experiment that can now be performed more cost-effectively using the NI ELVIS platform and LABVIEW™ software. Applications:- Stabilization of rocket during take-off, Human posturing system, Traction control of vehicles etc. |

|
Introduction:- The Heating and Air Conditioning (HVAC) board teaches students how to design a control System that regulates temperature in a chamber using the NI ELVIS workstation and LabVIEW�Interface. It is ideal for illustrating concepts covered in fluid dynamics and thermodynamics control. Applications:- Heating ventilation and air conditioning system ,Incubators, Aquarium, Bioreactors etc. |

|
Introduction:- The Vertical Take-off and Landing Trainer (VTOL) is designed to teach and demonstrate the fundamentals of vertical take-off and landing flight control. The system can be configured to utilize a variety of control methods to control the flight of the trainer. In particular, the system can be used to teach current control, and PID control fundamentals. This is done using a PC with real-time control capabilities and the NI ELVIS II. Applications:- Helicopters, Rockets, Balloons, Harrier jets, Tiltrotors etc. |

|
Introduction:- The Mechatronic Sensors board teaches the fundamentals of various types of sensors and demonstrates their advantages and limitations. This experiment introduces the student to a wide variety
of sensors that are commonly used today. The board uses the NI ELVIS platform and LabVIEW™ software for precise measurement of the sensor data.
Applicationss:- Automotive industry, Automation and assembly line design, Vibration history of a package in shipping, Robotics, Common household electrical devices etc. |
|
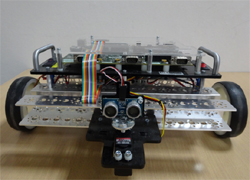
Introduction:- The NI LabVIEW Robotics Starter Kit is an out-of-the-box mobile robot platform that features sensors, motors, and NI Single-Board RIO hardware for embedded control. The LabVIEW Robotics software included with the platform includes features for beginners and for those who are more experienced. If you are new to LabVIEW, you can use the high-level LabVIEW Robotics Starter Kit API to quickly get started and control the robot in real time. |

|
Introduction:- Direction, speed, auto, manual operations of Stepper Motor, Position control by step operation, Position control by continuous operation , Angle control by step operation, Speed control by control switch, Angle control by software, Dynamic current / torque characteristics,. Closed loop Experiment with servo pot for PID experiments. |
|
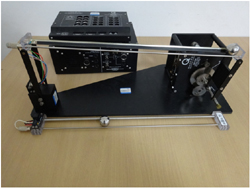
Introduction:- The ball and beam system consists of a long beam which can be tilted by a servo or electric motor together with a ball rolling back and forth on top of the beam. The Ball and Beam module is ideal to introduce various control concepts related to unstable closed loop systems. You can use it to demonstrate real-world control challenges such as aircraft roll control. Students will learn how to break down a problem and design a cascade control to stabilize the ball. When mounted on the Rotary Servo Base Unit, this experiment effectively demonstrates a real-life Applications of PD control and how it relates to stabilizing a ball on a track. |
|
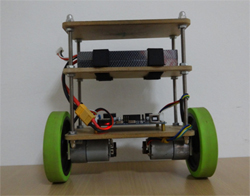
Introduction:- The Balanduino kit consist of an Arduino compatible main board with the necessary sensors to keep the robot balances automatically. The Balanduino will keep itself balanced right out of the box due to the highly optimized, tuned and preprogrammed PID loop used in the balancing-software
controller-algorithm. By combining accelerometer, gyroscope and rotary encoder data, the Balanduino is able to keep itself balanced even when pushed .
Applicationss:- They can be even use as vehicles by human, Segway robot can be used in such a way as to travel forward or backward. |

|
Introduction:- The Multitank System comprises a number of separate tanks fitted with drain valves. The separate tank mounted in the base of the setup acts as a water reservoir for the system. Some of the tanks have a constant cross section while other are spherical or conical so having variable cross section. The Multitank system has been designed to operate with an external PC based digital controller. The control computer communicates with the level sensors valves and pump by a dedicated I/O board and power interface. The I/O board is controlled by the real time software which operates in MATLAB/SIMulink RTW/RTWI. Applicationss:-These type of systems are used in liquid or chemical industry for mixturing the chemicals and controlling the outflows of liquids etc. |
|
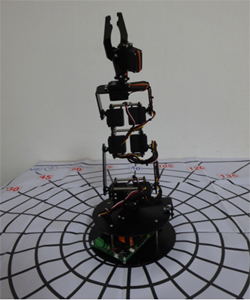
Introduction:- A robotic arm is a type of mechanical arm, usually programmable, with similar functions to a human arm; the arm may be the sum total of the mechanism or may be part of a more complex robot. The links of such a manipulator are connected by joints allowing either rotational motion (such as in an articulated robot) or translational (linear) is placement. Dexter ER2 Robotic Arm is a 5 Axis robotic Arm + Servo Gripper. It uses 7 metal gear servo motors with 15Kg/cm torque and two servo motors with 7Kg/cm torque. Robot Arm has 5 degrees of freedom which includes: Base rotation, Shoulder rotation, Elbow rotation, Wrist pitch and roll. Out of which Shoulder rotation, Elbow rotation, Wrist pitch has two 15Kg/cm torque servo motors in parallel for giving additional torque. Applicationss:-Robotics arms are used in industry areas for Painting cars, welding cars etc work. |